

BRASIL:CampeûÈo Mundial da ROBOCUP
Considerada a copa mundial de robûÇs, a RoboCup surgiu no final da dûˋcada de 90, e seu objetivo ûˋ produzir uma seleûÏûÈo de robûÇs jogadores de futebol, que futuramente jogue contra a seleûÏûÈo campeûÈ do mundo. Considerando que os melhores robûÇs humanoides ainda nûÈo existiam, este foi um objetivo bem ousado.
A RoboCup ûˋ modelada em dois grandes grupos que se diferenciam pelo nûÙvel escolar, sendo o universitûÀrio, chamado de Major, e o nûÙvel com alunos desde ensino fundamental atûˋ ensino mûˋdio, chamado de Junior. Na mesma competiûÏûÈo existem as etapas nacionais e internacionais, sendo necessûÀrio conquistar na etapa nacional, uma vaga para ter direito de participar da internacional. Este formato proporciona todo ano uma troca de informaûÏûçes importante para formaûÏûÈo acadûˆmica e profissional dos estudantes.
Em 2006 o Brasil registrou sua primeira participaûÏûÈo oficial na RoboCup, evento surpreendente se contarmos que atûˋ hoje a robû°tica continua sendo uma ûÀrea pouco praticada pelos brasileiros. Mas mesmo comeûÏando em 2006, o evento sû° tomou grandes proporûÏûçes quatro anos depois, com muita garra dos participantes.
Uma das primeiras equipes a vir entrar no cenûÀrio brasileiro e internacional da RoboCup surgiu na Comphaus, que participou da sua primeira ediûÏûÈo internacional em 2009, e desde entûÈo nûÈo parou mais de nos representar mundo afora. E mesmo entrando num campeonato bem desconhecido, jûÀ em 2009 a Comphaus, com a equipe Hipûˋrion, trouxe para o Brasil a premiaûÏûÈo do SuperTeam e de melhor programaûÏûÈo, na categoria de danûÏa.
Mais surpreendente apû°s cada campeonato sûÈo as experiûˆncias adquiridas. E foi aproveitando todas as oportunidade que os integrantes, Wallace Souza e Renato Ferreira, da equipe Hipûˋrion, orientados por Luis Rogûˋrio e Ricardo Hahn, levaram a Comphaus ao topo da RoboCup internacional em 2011 na Turquia, foram a primeira equipe brasileira a ganhar o prûˆmio de campeûÈ da RoboCup Junior na categoria resgate, tornando-se tambûˋm a û¤nica equipe brasileira a chegar ao topo da RoboCup, ganhando o principal prûˆmio em sua categoria. Pra conferir o belo resultado da equipe em 2011 ûˋ sû° acessar o link a seguir: (http://www.robocup2011.org/en/content.asp?PID={56FB3757-2D1A-4360-AA22-C922A56F5948}&PageFn=Results).

Experiûˆncias como esta vivida pela Hipûˋrion nûÈo podemos deixar passar, ou melhor, temos que adquirir o mûÀximo possûÙvel. E para reviver um pouco dessa experiûˆncia os integrantes Wallace e Renato, nos privilegiaram com a entrevista que podemos conferir logo abaixo.
ô
– Considerando os vûÀrios outros projetos que fizeram, quanto o resgate de 2011 foi especial e o quanto vocûˆs se esforûÏaram pra fazer este projeto?
Renato:ô Eu diria que foi especial por dois pontos. Primeiro, porque conseguimos juntar, na nossa equipe, habilidades nûÈo sû° diferentes como complementares, o que possibilitou que chegûÀssemos a uma soluûÏûÈo mais completa e a um processo de trabalho bem eficiente.ô Segundo, porque foi um projeto muito inovador, no sentido de resolver o desafio com estratûˋgias alternativas e, aliado a isso, de ter sido um robûÇ construûÙdo com um material (VEX) que nûÈo costuma ser aplicado ao desafio do Resgate.
ô Justamente para atingir esses diferenciais, nos esforûÏamos bastante, trabalhando por muito tempo e rotineiramente refazendo soluûÏûçes que podiam ser otimizadas atûˋ chegar ao projeto final que, na verdade, continuou sendo melhorado em todos os dias do campeonato.ô
Wallace:ô Com certeza, de todos os projetos que executei atûˋ 2011, o desafio de resgate foi o que mais demandou de recursos e conhecimentos computacionais. Mesmo sendo um desafio minimalista ele exige muito dos projetistas. Novos mecanismos foram introduzidos para a resoluûÏûÈo do problema. Sem dû¤vida foi um desafio bastante especial e importante para a minha formaûÏûÈo. Pude participar de uma competiûÏûÈo de alto nûÙvel. Nossa equipe era forte e tive a oportunidade de trabalhar com gente muito boa tanto em aspectos tûˋcnicos como pessoais.
ô
– Vocûˆs passaram a ver a competiûÏûÈo diferente depois de ganhar a premiaûÏûÈo? Como?
Renato:ô Acho que sim. Se, por um lado, antes a competiûÏûÈo e, principalmente, o primeiro lugar era algo distante, como que inalcanûÏûÀvel, que depois passou a ser algo que entendo como uma possibilidade, tambûˋm foi possûÙvel ver a magnitude do trabalho necessûÀrio para se atingir esse resultado, bem como toda uma conjunûÏûÈo de fatores que, muitas vezes, vai alûˋm de simplesmente nossas habilidades. Assim, apesar de ter se tornado uma possibilidade concreta e provada ganhar, acho que a experiûˆncia me mostrou, em igual intensidade, o quûÈo improvûÀvel esse tipo de acontecimento ûˋ.
Wallace:ô As pessoas sûÈo movidas por superaûÏûçes, estamos sempre buscando o topo. Ganhar o tûÙtulo de uma das principais categorias da RCJ sem duvida foi motivador. Depois da premiaûÏûÈo passei imaginar como poderûÙamos entrar em categorias mais desafiadoras.
ô
ô – O que foi mais difûÙcil atûˋ ser campeûÈo internacional?
Renato:ô Provavelmente, a persistûˆncia, que pode ser ilustrada em duas situaûÏûçes distintas.
ô Antes do evento, seria a persistûˆncia e a “coragem” para alterar o projeto e melhorûÀ-lo mesmo quando ele jûÀ funciona, de modo a cobrir mais casos ou deixûÀ-lo mais eficiente. Isso requer muito empenho, pois ûˋ fûÀcil ignorar os testes mais patolû°gicos e se manter com uma soluûÏûÈo apenas razoûÀvel.
ô JûÀ no evento, existe a questûÈo da persistûˆncia e da resistûˆncia fûÙsica e mental mesmo; depois de alguns dias, ûˋ necessûÀria muita disciplina para continuar indo dormir tarde e acordando cedo para melhorar o projeto, corrigir erros, analisar os desafios do dia, etc. û esgotante, mas necessûÀrio para resultados competitivos. Como o desafio nûÈo ûˋ 100% conhecido, nûÈo existe projeto 100% pronto.ô
Wallace:ô O mais difûÙcil foi ser criativo para implementar funcionalidades que refletissem em um diferencial no nosso robûÇ. Por conta de limitaûÏûÈo de recursos. Ao invûˋs de acelerûÇmetros usamos um pûˆndulo com um sensor de toque, a garra possuûÙa um mecanismo diferenciado para nunca tomar a lata. A disposiûÏûÈo dos sensores para detecto da linha foi elaborada para facilitar a detecûÏûÈo de curvas.
ô
ô – Vocûˆs acham que ajudaram a robû°tica brasileira em algum aspecto?
Renato:ô Indiretamente, sim. NûÈo sû° essa participaûÏûÈo em particular, mas tambûˋm todos os anos de trabalho com outras pessoas incrûÙveis, certamente colaboraram para esse “ecossistema” que se forma entre os jovens estudiosos de tecnologia que, no futuro, constituirûÈo o corpo brasileiro de robû°tica e de outras ûÀreas parentes.
Wallace:ô Sem duvida sim, ainda mais se nossos resultados forem mais bem divulgados. Se a informaûÏûÈo chegar, outros brasileiros verûÈo que somos capazes, que um ramo tûÈo sofisticado da tecnologia pode ser dominado por nû°s. Nosso resultado foi inûˋdito e nûÈo tenho duvida que pode ser inspirador. Quando esse universo que ûˋ a robû°tica e suas competiûÏûçes estiverem mais difundidos acredito que se lembrarûÈo desse comeûÏo.
ô
– O que foi fundamental para a equipe Hipûˋrion vencer?
Renato:ô Alûˋm dos pontos jûÀ mencionados, algo que certamente foi fundamental foi a heranûÏa que tivemos de projetos e experiûˆncias passadas. Alûˋm da nossa prû°pria bagagem, acumulada com outras equipes e eventos, nossa abordagem foi inspirada por um projeto criado em 2010 para o mesmo desafio. Sem tais referûˆncias e experiûˆncias, teria sido muito difûÙcil criar algo “correto” a partir do zero.
Wallace:ô Sem sombra de duvidas a garra dos competidores. A competiûÏûÈo foi tensa do comeûÏo ao fim, ao coisas nûÈo deram muito certo em um primeiro momento. A superaûÏûÈo ocorreu antes e durante a competiûÏûÈo. Sem a dedicaûÏûÈo de todos os membros, madrugadas mal dormidas para consertar bugs e dedicaûÏûÈo plena nû°s nûÈo terûÙamos alcanûÏado esse resultado.
ô
ô – Na opiniûÈo de vocûˆs o que falta para o Brasil conquistar melhores resultados?
Renato:ô Maior diversidade e alcance no estudo e na prûÀtica da robû°tica e da computaûÏûÈo. Podemos ter equipes muito dedicadas e alunos excepcionalmente talentosos, mas nûÈo se compete com paûÙses com trûˆs, cinco, dez vezes o “pool” de participantes.
ô Com a popularizaûÏûÈo das competiûÏûçes e da robû°tica como parte do currûÙculo escolar, sou otimista em relaûÏûÈo a essa questûÈo. Tambûˋm ûˋ importante ressaltar que mesmo os resultados em competiûÏûçes nûÈo devem ser o objetivo final, e sim um indicador importante para outras variûÀveis, como a qualidade da nossa educaûÏûÈo e a nossa preparaûÏûÈo para a formaûÏûÈo de mûÈo-de-obra qualificada, tanto para o mercado quanto para a academia.
Wallace:ô Maior divulgaûÏûÈo, mais investimentos e estimulo interno. Precisamos de competiûÏûçes nacionais incentivando a formaûÏûÈo de equipes. Isso farûÀ com que as que se destacarem tenham dito bastante experiûˆncia jûÀ dentro de seu paûÙs. Nosso resultado mostra claramente que somos capazes, mas infelizmente a realidade tûˋcnica de outros paûÙses ûˋ superior a nossa. Atûˋ mesmo paûÙses com condiûÏûçes de renda muito inferiores.
ô
ô – Se vocûˆs pudessem dar uma dica para as equipes brasileiras qual seria?
Renato:ô Ser persistente, utilizar conhecimentos e experiûˆncias passadas de maneira, inteligente, e encarar cada competiûÏûÈo como uma possibilidade de aprendizado. Acho que hoje o nûÙvel da competiûÏûÈo brasileira jûÀ estûÀ maior do que nos anos em que participei, o que significa que focar apenas nos resultados serûÀ cada vez mais improdutivo. Focar no aprendizado, entretanto, sû° pode trazer vantagens, e ûˋ o que eu recomendaria.
Wallace:ô Acreditar em seu trabalho, mesmo quando parece estar dando tudo errado. Se nûÈo tivûˋssemos sido tûÈo persistentes em 2011 eu nûÈo estaria escrevendo esse texto.
Com estas belas palavras de Renato Ferreira e Wallace Souza, percebemos o quanto este tûÙtulo proporcionou uma experiûˆncia incrûÙvel para quem presenciou qualquer parte do projeto. Nota-se tambûˋm que pouco falaram da qualidade do robûÇ, afinal obter um bom resultado pouco mostra a qualidade do robûÇ, na verdade mostra um û°timo projeto, o qual, alûˋm de bem planejado, foi bem executado. Alûˋm do grande potencial que a equipe mostrou, tambûˋm foi possûÙvel perceber que a Hipûˋrion contribuiu e continua contribuindo para mudar a realidade da robû°tica no Brasil, afinal, dividir tais experiûˆncias como fizeram nesta matûˋria, inspira muita gente. E para matar um pouco da curiosidade de como foi a performance do robûÇ da Hipûˋrion podemos conferir dois vûÙdeos feitos na competiûÏûÈo nestes linksô [VûÙdeo 1]ô eô [VûÙdeo 2].
Um bom reflexo da contribuiûÏûÈo para o nosso paûÙs jûÀ veio em 2012, quando com apenas um ano apû°s a vitû°ria da Hipûˋrion tivemos o maior numero de equipes brasileiras em uma ediûÏûÈo internacional da RoboCup, ediûÏûÈo que foi sediada no Mûˋxico. Mostrando que alûˋm de experiûˆncia, a Comphaus conseguiu trazer mais um desafio para diversas equipes brasileiras.
Este ano teremos uma RoboCup internacional no Brasil, evento desejados por muitos, e sem sombra de dû¤vidas uma boa oportunidade para as equipes brasileiras mostrarem seu potencial, e para provar que a vitû°ria da Hipûˋrion com seu belo projeto trouxe muita inspiraûÏûÈo para o cenûÀrio da robû°tica brasileira.
Conselho Editorial: Luis Rogûˋrio, Lucas Cavalcanti, Renato Ferreira ô e Ricardo Hahn.
Gestor ResponsûÀvel das EdiûÏûçes de 2014: Lucas Cavalcanti
 Este novo desafio jûÀ ûˋ um passo e tanto, porûˋm nûÈo acaba ai, teremos tambûˋm um kit de robû°tica da Modelix, chamado Kit Principal TJR , montado especialmente para o desafio que acontece dentro do TJR. Para conhecer um pouco deste novo kit de Robû°tica confira a lista de materiais inclusos no kit e posteriormente uma anûÀlise.
Este novo desafio jûÀ ûˋ um passo e tanto, porûˋm nûÈo acaba ai, teremos tambûˋm um kit de robû°tica da Modelix, chamado Kit Principal TJR , montado especialmente para o desafio que acontece dentro do TJR. Para conhecer um pouco deste novo kit de Robû°tica confira a lista de materiais inclusos no kit e posteriormente uma anûÀlise.
- 1 Microcontrolador 3.6
- 3 Conectores duplos
- 1 Sensor de toque
- 2 Motores MM6
- 1 Cabo Digital
- 2 LEDs
- 2 Sensores de Luz
- 2 Sensores de ObstûÀculo
- 1 Controle Remoto
- 1 Cabo USB
- 4 Vigas de 7 Furos
- 4 Vigas de 5 Furos
- 4 Vigas de 4 Furos
- 4 Vigas de 2 Furos
- 8 Engrenagens (Sortidas)
- 2 Cremalheiras
- 52 Barras (sortidas)
- 5 Plataformas PlûÀsticas
- 9 Plataformas MetûÀlicas
- Conjunto de Buchas
- Conjunto de Parafusos, Porcas e Arruelas
- 1 Roda Boba
- 4 Rodas ( dois de cada tamanho)
- 4 Eixos Quadrados
- 12 OãRings
- 2 Cantoneiras
- 1 Mancal
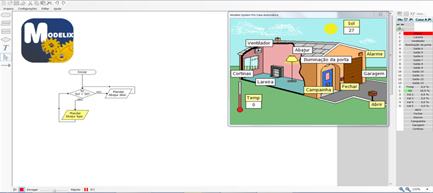 Programar ô o robûÇ tambûˋm ûˋ algo bem interessante nos kits da Modelix Robotics, afinal eles possuem um software super didûÀtico chamado Modelix System Pro. O grande diferencial do System Pro sûÈo as opûÏûçes de controle, entre elas temos como controlar o robûÇ em tempo real via computador, programar instruûÏûçes para o microcontrolador e por û¤ltimo executar simulaûÏûçes de ambientes reais. Com o Modelix System Pro, podemos ir a fundo em cada item do nosso robûÇ, abrindo espaûÏo para aprendermos muito mais.
ô
Mesmo com essa anûÀlise do kit pode restar algumas dû¤vidas, entûÈo nûÈo deixe de acessar neste linkô a documentaûÏûÈo de outro kit com a descriûÏûÈo dos componentes, presentes tambûˋm no Kit Principal TJR.
ô
Se vocûˆ ficou interessado em adquirir o Kit Principal TJR, ûˋ sû° entrar no TJR Shop atravûˋs deste link.
ô
E nûÈo se esqueûÏa de garantir seu desconto no TJR Shop, basta apenas adquirir o TJR Card neste link.
ô
Conselho Editorial: Luis Rogûˋrio, Lucas Cavalcanti, Renato Ferreira ô e Ricardo Hahn.
Gestor ResponsûÀvel das EdiûÏûçes de 2014: Lucas Cavalcanti.
ô
Conhecida por muitos a Arduino ûˋ uma plataforma italiana, de projeto aberto (open-source), com intuito de ser barata e facilmente manuseada tanto na hora de criar o software como o hardware, se tornou uma ferramenta essencial para artistas, designers e qualquer pessoa com o objetivo comeûÏar a criar algum projeto, seja ele eletrûÇnico ou mecûÂnico.
ô
A Arduino na sua maioria trabalha com o microcontrolador da famûÙlia AVR, porûˋm devido sua expansûÈo no mercado e sua versatilidade para diversos projetos, hoje temos Arduinos atûˋ com ARM Cortex, tornando possûÙvel utilizar a mesma plataforma com um maior processamento. Mesmo com algumas diferenûÏas devido û arquitetura do microcontrolador, existe compatibilidade com os diversos projetos das primeiras Arduinos.
ô
Talvez o fator mais importante e que levou a Arduino a crescer mais que outras plataformas foi a simplicidade na hora programar. Usa-se a linguagem de programaûÏûÈo Arduino que foi baseada num framwork para microcontroladores, chamado Wiring, tal linguagem virou tûÈo popular que atualmente diversas outras plataformas a utilizam, e um dos melhores exemplos ûˋ a Intel Galileo.
ô
A plataforma Galileo veio da Intel, a gigante empresa dos processadores para computador, investiu em um processador 25 vezes melhor que as Arduinos comuns e com arquitetura do famoso Intel Pentium, porûˋm manteve sua compatibilidade de software e design com as placas Arduinos, mostrando como a empresa italiana saiu de um projeto da universidade para conquistar o mundo.
ô
Programar ô o robûÇ tambûˋm ûˋ algo bem interessante nos kits da Modelix Robotics, afinal eles possuem um software super didûÀtico chamado Modelix System Pro. O grande diferencial do System Pro sûÈo as opûÏûçes de controle, entre elas temos como controlar o robûÇ em tempo real via computador, programar instruûÏûçes para o microcontrolador e por û¤ltimo executar simulaûÏûçes de ambientes reais. Com o Modelix System Pro, podemos ir a fundo em cada item do nosso robûÇ, abrindo espaûÏo para aprendermos muito mais.
ô
Mesmo com essa anûÀlise do kit pode restar algumas dû¤vidas, entûÈo nûÈo deixe de acessar neste linkô a documentaûÏûÈo de outro kit com a descriûÏûÈo dos componentes, presentes tambûˋm no Kit Principal TJR.
ô
Se vocûˆ ficou interessado em adquirir o Kit Principal TJR, ûˋ sû° entrar no TJR Shop atravûˋs deste link.
ô
E nûÈo se esqueûÏa de garantir seu desconto no TJR Shop, basta apenas adquirir o TJR Card neste link.
ô
Conselho Editorial: Luis Rogûˋrio, Lucas Cavalcanti, Renato Ferreira ô e Ricardo Hahn.
Gestor ResponsûÀvel das EdiûÏûçes de 2014: Lucas Cavalcanti.
ô
Conhecida por muitos a Arduino ûˋ uma plataforma italiana, de projeto aberto (open-source), com intuito de ser barata e facilmente manuseada tanto na hora de criar o software como o hardware, se tornou uma ferramenta essencial para artistas, designers e qualquer pessoa com o objetivo comeûÏar a criar algum projeto, seja ele eletrûÇnico ou mecûÂnico.
ô
A Arduino na sua maioria trabalha com o microcontrolador da famûÙlia AVR, porûˋm devido sua expansûÈo no mercado e sua versatilidade para diversos projetos, hoje temos Arduinos atûˋ com ARM Cortex, tornando possûÙvel utilizar a mesma plataforma com um maior processamento. Mesmo com algumas diferenûÏas devido û arquitetura do microcontrolador, existe compatibilidade com os diversos projetos das primeiras Arduinos.
ô
Talvez o fator mais importante e que levou a Arduino a crescer mais que outras plataformas foi a simplicidade na hora programar. Usa-se a linguagem de programaûÏûÈo Arduino que foi baseada num framwork para microcontroladores, chamado Wiring, tal linguagem virou tûÈo popular que atualmente diversas outras plataformas a utilizam, e um dos melhores exemplos ûˋ a Intel Galileo.
ô
A plataforma Galileo veio da Intel, a gigante empresa dos processadores para computador, investiu em um processador 25 vezes melhor que as Arduinos comuns e com arquitetura do famoso Intel Pentium, porûˋm manteve sua compatibilidade de software e design com as placas Arduinos, mostrando como a empresa italiana saiu de um projeto da universidade para conquistar o mundo.
ô
- Arduino UNO
| Micro controlador | ATmega328 |
| TensûÈo de operaûÏûÈo | 5V |
| TensûÈo de entrada (recomendada) | 7-12V |
| TensûÈo de entrada (limites) | 6-20V |
| Pinos digitais | 14 (6 dos 14 possui modulaûÏûÈo PWM) |
| Pinos analû°gicos de entrada | 6 |
| Corrente mûÀxima por pino | 40 mA |
| Corrente mûÀxima no pino 3v3 | 50 mA |
| Memû°ria flash | 32 KB (ATmega328) |
| SRAM | 2 KB (ATmega328) |
| EEPROM | 1 KB (ATmega328) |
| FrequûÂncia do clock | 16ô MHz |
| Arduinos | Nô¤ pinos digitais | Nô¤ pinos analû°gicos | FunûÏûÈo especûÙfica |
| Uno | 14 | 6 | Pequenos projetos |
| Mega2560 | 54 | 16 | Grandes projetos |
| Due | 54 | 12 | Projeto de alto desempenho |
| Yû¤n | 20 | 12 | Conectar a internet com Linux integrado a placa |
| Micro | 20 | 12 | Projetos compactos |
| LiLy | 9 | 4 | Projeto extremamente pequeno |
| Robot | 16 | 16 | RobûÇ pronto para programar |
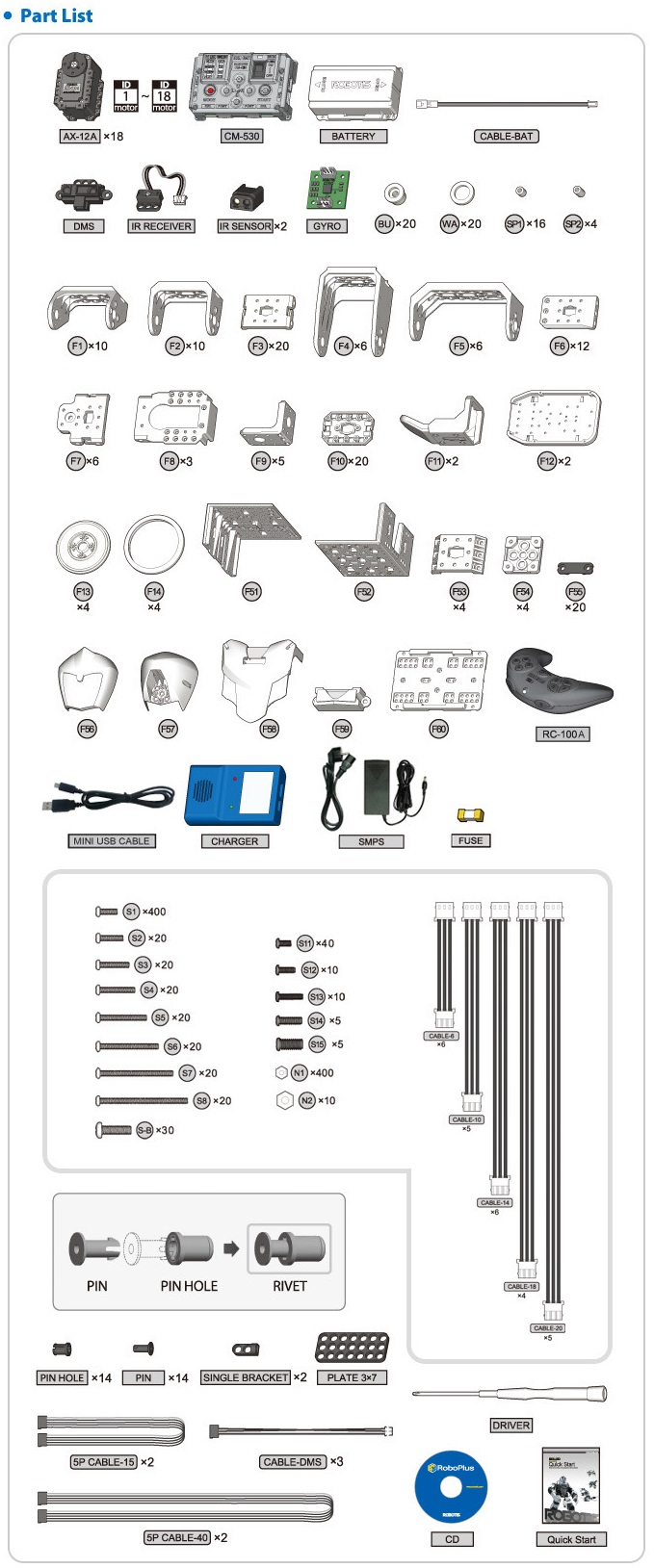
 Bioloid Premium e seus principais componentes
Os principais itens do kit Bioloid Premium sûÈo:
– Controlador CM-530 (ARM Cortex(32bits)) x1.
– AX-12A (Motores Dynamixel) x 18.
– Giroscû°pio de dois eixos x1.
– Sensor infravermelho de distûÂncia (Sharp) x1.
– Sensor infravermelho x2.
– Receptor de infravermelho x1.
– Controle Remoto (RC-100A) x1.
– Mû°dulo de comunicaûÏûÈo wireless x1.
– Bateria LiPo (3S, 11,1 V, 1000 mA) x1.
– Fonte e carregador da bateria LiPo x1.
– Chave philips x1.
– PeûÏas estruturais, parafusos, porcas e cabos.
– CD com software de programaûÏûÈo x1.
– Revista com primeiros passos x1.
ô
Entrando mais afundo nos componentes do kit temos o controlador CM-530, que possibilita programar o seu robûÇ deixando-o em modo autûÇnomo ou controlar atravûˋs de um controle remoto. Este controlador possui uma grande velocidade de processamento, afinal controlar 18 motores e mais alguns sensores simultaneamente exige muito do controlador.
Nos sensores temos o giroscû°pio com funûÏûÈo de identificar a velocidade de rotaûÏûÈo dada pelo robûÇ, porûˋm ûˋ utilizado com frequûˆncia para identificar quedas, permitindo a correûÏûÈo imediata do posicionamento do robûÇ. JûÀ os sensores de infravermelho servem para identificar obstûÀculos, ou tonalidades de superfûÙcies, por exemplo: distinûÏûÈo entre preto e branco; entretanto o receptor infravermelho tem apenas a funûÏûÈo de receber dados do controle remoto. Outro item a se destacar ûˋ a pequena e poderosa bateria, feita de ûÙon-polûÙmero, ûˋ a melhor e mais utilizada dentro da robû°tica e do aeromodelismo, pois durante sua descarga quase nûÈo sofre alteraûÏûÈo na potûˆncia fornecida, por outro lado exige cuidados como nûÈo permitir que sua tensûÈo chegue a menos que 3V por cûˋlula, o que causaria estrago da mesma e consequentemente da bateria.
DûÀ pra ver, alguns itens do Bioloid Premium sûÈo bem conhecidos, como as baterias LiPo e seus sensores, porûˋm a melhor coisa dentro da caixa deste kit sûÈo os motores. Sem dû¤vida eles fornecem a possibilidade de uma estruturaûÏûÈo firme e bem articulada, porûˋm o grande diferencial ûˋ sua precisûÈo e torque. Se pensarmos que todo o humanoide pesa em torno de 1.7 Kg, e que em alguns movimentos apenas um motor sustenta toda a estrutura, seria ousado fazer tais movimentos, porûˋm o motor AX-12A tem uma precisûÈo capaz de manter todo o robûÇ em pûˋ e bem articulado. Quando afirmei no inicio do post que podemos utilizar este kit para competiûÏûçes, com certeza sûÈo os motores dele que trouxeram tal potencial, e por esta razûÈo iremos ter um post apenas sobre estes motores, explicando melhor seu funcionamento e fornecendo outras maneiras de explora-lo.
ô
– Se vocûˆ ficou com alguma dû¤vida ou tem interesse em saber um pouco mais sobre o kit nûÈo deixe de perguntar nos comentûÀrios.
– Se vocûˆ deseja saber a quantidade exata de itens no kit cliqueô aqui.
– Se vocûˆ deseja comprar o Bioloid Premium acesse:ô http://comphaus.com.br/home/?page_id=98
ô
Conselho Editorial: Luis Rogûˋrio, Lucas Cavalcanti, Renato Ferreira ô e Ricardo Hahn.
Gestor ResponsûÀvel das EdiûÏûçes de 2014: Lucas Cavalcanti.
ô
Bioloid Premium e seus principais componentes
Os principais itens do kit Bioloid Premium sûÈo:
– Controlador CM-530 (ARM Cortex(32bits)) x1.
– AX-12A (Motores Dynamixel) x 18.
– Giroscû°pio de dois eixos x1.
– Sensor infravermelho de distûÂncia (Sharp) x1.
– Sensor infravermelho x2.
– Receptor de infravermelho x1.
– Controle Remoto (RC-100A) x1.
– Mû°dulo de comunicaûÏûÈo wireless x1.
– Bateria LiPo (3S, 11,1 V, 1000 mA) x1.
– Fonte e carregador da bateria LiPo x1.
– Chave philips x1.
– PeûÏas estruturais, parafusos, porcas e cabos.
– CD com software de programaûÏûÈo x1.
– Revista com primeiros passos x1.
ô
Entrando mais afundo nos componentes do kit temos o controlador CM-530, que possibilita programar o seu robûÇ deixando-o em modo autûÇnomo ou controlar atravûˋs de um controle remoto. Este controlador possui uma grande velocidade de processamento, afinal controlar 18 motores e mais alguns sensores simultaneamente exige muito do controlador.
Nos sensores temos o giroscû°pio com funûÏûÈo de identificar a velocidade de rotaûÏûÈo dada pelo robûÇ, porûˋm ûˋ utilizado com frequûˆncia para identificar quedas, permitindo a correûÏûÈo imediata do posicionamento do robûÇ. JûÀ os sensores de infravermelho servem para identificar obstûÀculos, ou tonalidades de superfûÙcies, por exemplo: distinûÏûÈo entre preto e branco; entretanto o receptor infravermelho tem apenas a funûÏûÈo de receber dados do controle remoto. Outro item a se destacar ûˋ a pequena e poderosa bateria, feita de ûÙon-polûÙmero, ûˋ a melhor e mais utilizada dentro da robû°tica e do aeromodelismo, pois durante sua descarga quase nûÈo sofre alteraûÏûÈo na potûˆncia fornecida, por outro lado exige cuidados como nûÈo permitir que sua tensûÈo chegue a menos que 3V por cûˋlula, o que causaria estrago da mesma e consequentemente da bateria.
DûÀ pra ver, alguns itens do Bioloid Premium sûÈo bem conhecidos, como as baterias LiPo e seus sensores, porûˋm a melhor coisa dentro da caixa deste kit sûÈo os motores. Sem dû¤vida eles fornecem a possibilidade de uma estruturaûÏûÈo firme e bem articulada, porûˋm o grande diferencial ûˋ sua precisûÈo e torque. Se pensarmos que todo o humanoide pesa em torno de 1.7 Kg, e que em alguns movimentos apenas um motor sustenta toda a estrutura, seria ousado fazer tais movimentos, porûˋm o motor AX-12A tem uma precisûÈo capaz de manter todo o robûÇ em pûˋ e bem articulado. Quando afirmei no inicio do post que podemos utilizar este kit para competiûÏûçes, com certeza sûÈo os motores dele que trouxeram tal potencial, e por esta razûÈo iremos ter um post apenas sobre estes motores, explicando melhor seu funcionamento e fornecendo outras maneiras de explora-lo.
ô
– Se vocûˆ ficou com alguma dû¤vida ou tem interesse em saber um pouco mais sobre o kit nûÈo deixe de perguntar nos comentûÀrios.
– Se vocûˆ deseja saber a quantidade exata de itens no kit cliqueô aqui.
– Se vocûˆ deseja comprar o Bioloid Premium acesse:ô http://comphaus.com.br/home/?page_id=98
ô
Conselho Editorial: Luis Rogûˋrio, Lucas Cavalcanti, Renato Ferreira ô e Ricardo Hahn.
Gestor ResponsûÀvel das EdiûÏûçes de 2014: Lucas Cavalcanti.
ô
{kind=link}
Busca
Carrinho de Compras 
Your shopping cart is empty
Visit the shop